For week 1 we’ve been tasked with CAD-ing up a potential final project.
Two things I am interested in exploring are:
Granite surface plates occupy this sort of anomalous space in engineering materials, where they are orders of magnitude cheaper than stock of comparable size relative to flatness. Granite also has excellent mechanical properties (dampening, CTE, flexural modulus), which makes it a good candidate for use as the structural base of a machine tool.
Optical measurement machines (OMMs) often use precision linear axes to image large parts with micron accuracy. However by using a statically mounted (telecentric) lens on a surface plate, it’s possible to manually move a part underneath, and stitch together a series of coarsely located overlapping images. Building a tool capable of doing both presents an opportunity to try both techniques (stitching with and without a sense global positional accuracy), which would allow for a better understanding of the accuracy of image stitching.
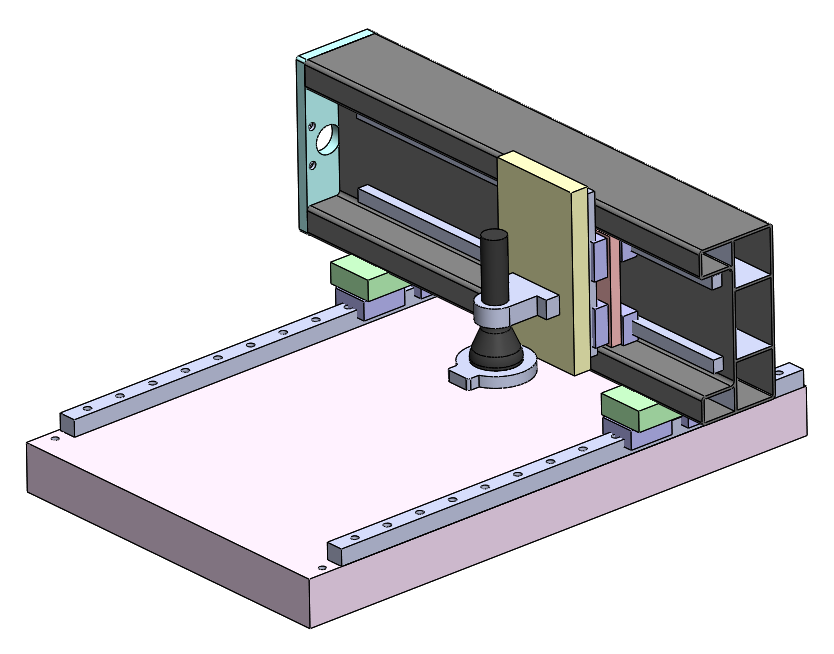
A great application would be a desktop mill similar to the ones made by Datron, but for the sake of adventure I will try to smush these projects together to make an OMM in the style of the preliminary CAD below.
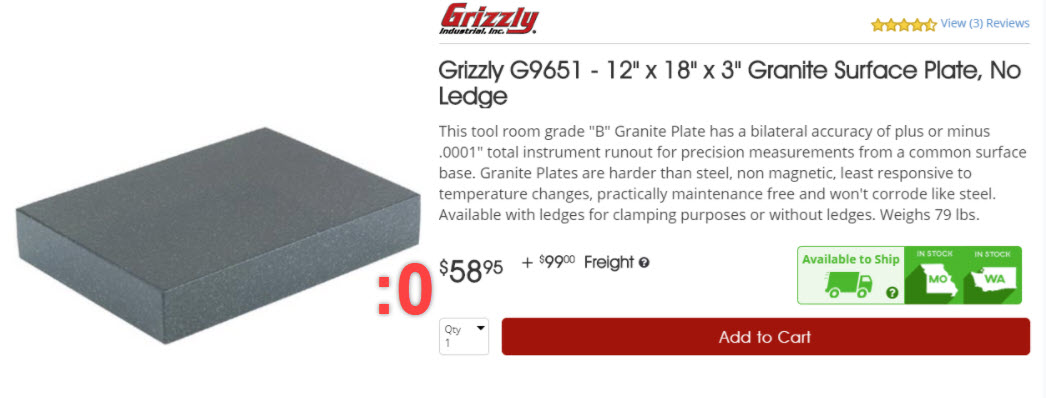
Grizzly sells a particularly cheap B-grade granite surface plate for $60. For context a comparable piece of cast iron (still only 60% of the volume) from mcmaster costs $285, and it’s tolerances run in the eighths of an inch, in contrast to 2.5 um of the surface plate over 12” x 18.””
There are plenty of great resources on how to put holes in granite, so hopefully by epoxying in some threaded inserts, it will be possible to cleanly mount linear rails without too much headache. Because I plan to build a moving gantry machine, everything else will connect in series with the rails, and the only granite-to-steel interface will exist here. Drilling the holes and epoxying the inserts is something that I am hoping to explore more in casting week. I would also like to mess around with making some epoxy granite, and using it to fill in an aluminum extrusion to win some extra rigidity and dampening in the moving access. Surprisingly, epoxy granite has even better dampening properties than granite, and while it would be fun to try and cast the entire base out of it, that might be pushing the limits of what I can get away with with so little time.
I have a nice telecentric lens purchased on ebay last year, with the intention of mounting it statically on a surface plate. To date I have taken some images on it with a raspberry pi high quality camera, which support C-mount lenses like the telecentric. It has a 1.55um x 1.55um pixel size, but only an 8mm sensor, so field of view with the telecentric should be about 30mm (with a 1/2” sensor I would have the full 40mm FoV). Unfortunately the lens requires a precise sensor to lens distance, and the camera has a floating adjustment here, so I will need to calibrate with objects at a known distance in order to get the full 20mm depth of field.
For a fascinating explanation of how telecentric imaging works and behaves (especially if you’ve ever wondered if orthographic views from CAD can be achieved in real life), check out the video below:

There’s one more aspect to this project that’s worth mentioning, which will be the need to establish where our camera is in cartesian space down to the (hopefully) micron scale. For this I have another open project, that is making DIY linear encoders out of hall effect sensors, and reading over some fancy magnetic tape I’ve pulled off of scrap industrial machinery. The sort of sensor I am describing is called a sin-cos encoder, and functions how you would imagine an analog quadrature encoder would work. More on that in later weeks. I am currently reading the tape to ~125um accuracy (error that repeats cyclically over the 2mm pole pitch of the tape), and so am planning to dedicate some of the [embedded programming + electronics design + input devices] weeks to try and bring this project along. As a fall back I can use some off the shelf rotary encoders, and mount them to the linear axes with friction drives.
