ArmLet: Absolute DoF Sensor
I had trouble finding affordable precision mesoscale inline positioning and shape sensing method.
IMU drifts a lot, and absolute distance calculation based on integration will drift with it.
So I guess i'll try to make one that doesn't use IMU.
How to make
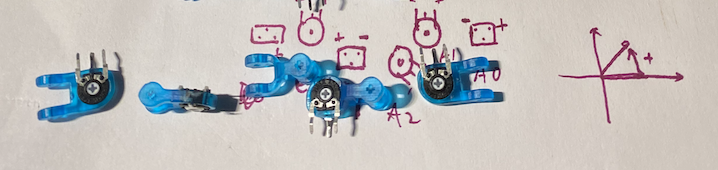
1. The general idea is to translate all 6 DoF between 2 points to rotation,
then use poteniometer to sensorized them.
2. It's tricky to make it small. All parts need to be printed with Formlabs3
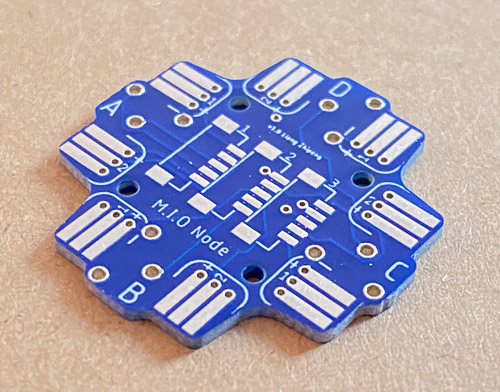
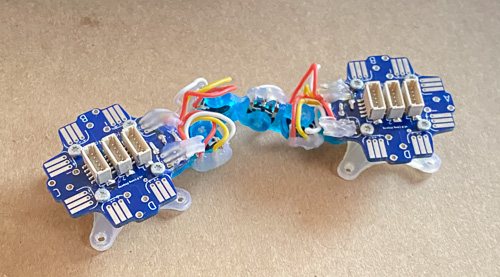
3. Make node pcb to host units on 4 sides. Using sockets in the middle for testing. Kept enough space for BC832 to replace them.
4.The most difficult part is this, will try EDM instead
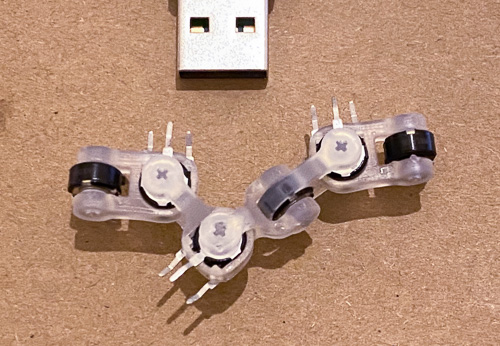
5. First prototypes looks good.
6. Little assembly, with an USB-A as scale
7. Needed many pieces of PCB with through-holes to hold poteniometer and double sided circuit, some features are too difficult to solder on a naked PCB made on Clank.
Eventually created my own library from scratch, generaled Gerber file from Eagle and sent to commercial PCB service.
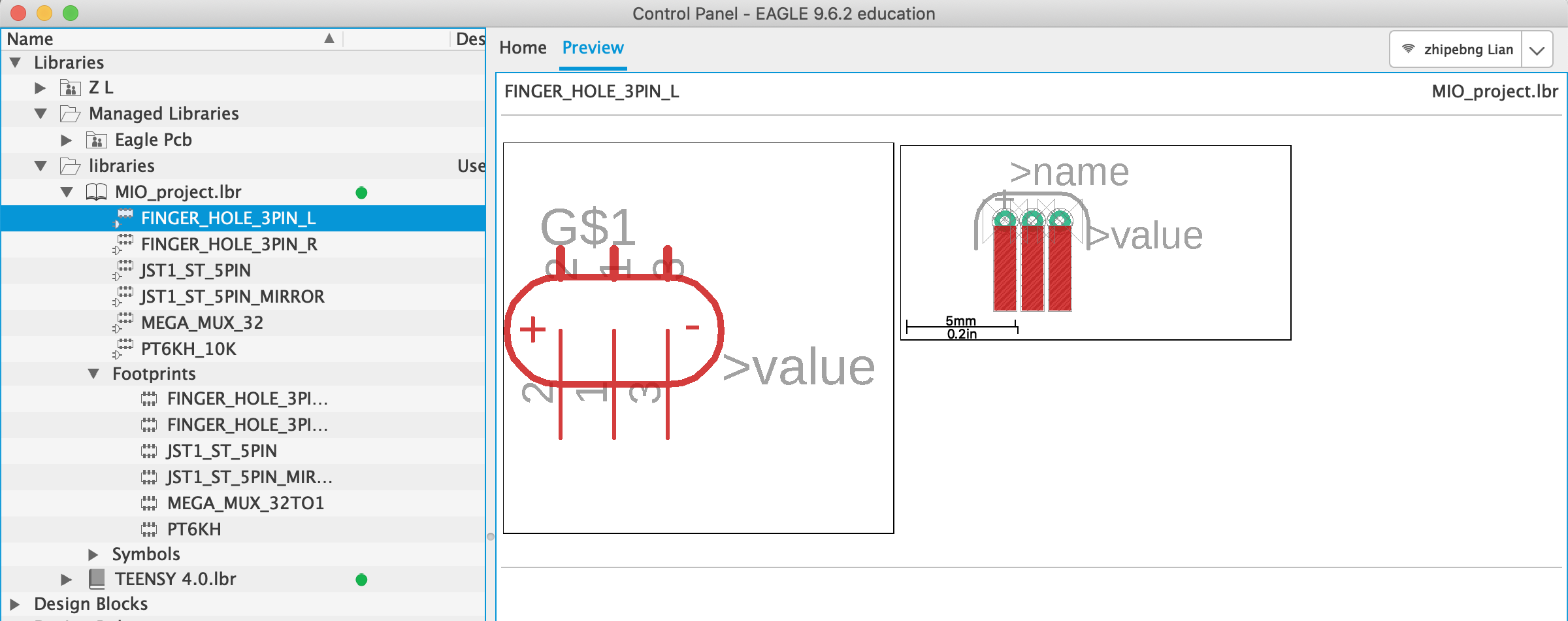
Received in 2 days.
8. Assembly of joints and PCB
9. Successfully rigged a 3D model in TouchDesigner.
Comparing with IMU on mesoscale positioning
Pro: No drift, power-break safe, irrelevant of system motion, low energy consumption.
Contra: Assembly effort, plastic flex affects reading, range limit, weight, life-span of poti
END